Наука и инновации
Политехники cоздали гибкие электрохимические сенсоры с помощью лазерных технологий
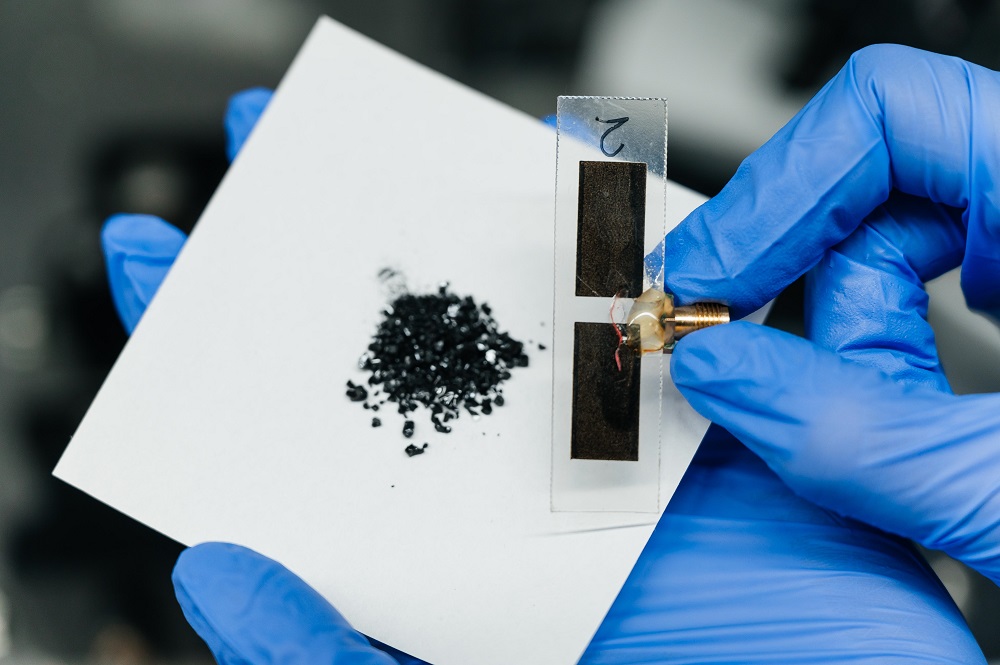
Ученые Исследовательской школы химических и биомедицинских технологий Томского политеха разработали новую технологию изготовления универсальных гибких датчиков для электрохимического анализа веществ. Она основана на лазерной обработке пленок оксида графена и наночастиц серебра на полимерной подложке. Полученные таким методом датчики недорогие в производстве, высокочувствительные и механически устойчивые. Кроме того, они могут быть адаптированы для детектирования различных молекул.